انجمن بین المللی مهندسان خودرو (SAE International) سطوح مختلفی برای خودمختاری (Autonomy) وسایل نقلیه و اتوموبیل های خودران تعریف کرده است. در سطح صفر این سطح بندی، وسایل نقلیه ای که هم اکنون به صورت روزانه از آن ها استفاده می کنیم قرار دارند و در سطح پنج آن، خودروهایی هستند که برای رساندن ما از یک نقطه به نقطه دیگر نیاز به تعامل انسانی ندارند. در حال حاضر، از سطح پنج فاصله داریم؛ زیرا موقعیت های زیادی وجود دارد که وسایل نقلیه خودران نمی توانند آن کپی کنند. با این وجود اگر صنعت و بخش های پژوهشی کار خود را به خوبی ادامه دهند، ممکن است زودتر از آنچه فکر می کنیم، به این فناوری دست پیدا کنیم. آیا می توانید یک خودروی بدون فرمان را تصور کنید؟
بیایید برخی از فناوری های توانمندسازی (Enabling Technologies) را که به استقلال خودروها کمک می کند و چگونگی ادغام آن ها برای حرکت خودکار اتومبیل، کامیون یا ماشین های اسپورت در خیابان ها را بررسی کنیم. تصور کنید ما یک خودروی معمولی داریم که می خواهیم آن را به یک خودروی خودران تبدیل کنیم. این خودرو به سه عنصر اصلی نیاز دارد:
اجزای یک خودرو خودران
- نقشه با وضوح بالا (HDMap)
- برآوردگر وضعیت و موقعیت جغرافیایی
- مدیریت حرکت
قبل از اینکه به این جنبه های کلیدی خودروهای خودران بپردازیم، چند مفهوم زمینه ای وجود دارد که ابتدا باید آنها را بررسی کنیم مانند: سنسورهای مورد استفاده برای خودرو ها.
سنسورها در اتوموبیل های خودران
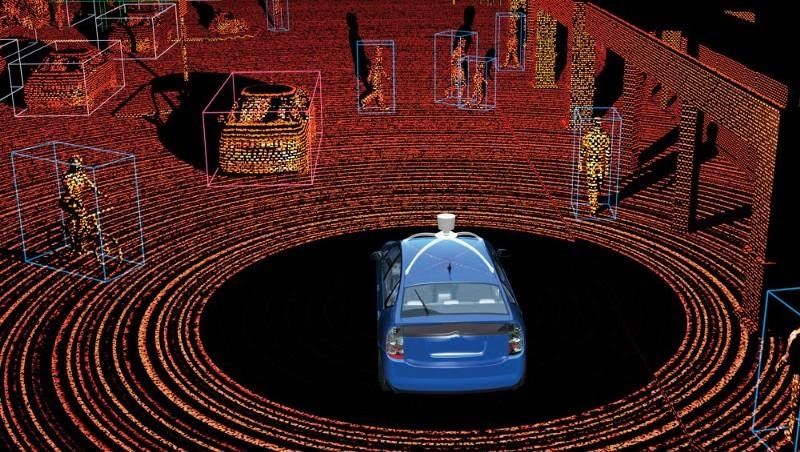
تشخیص و اندازه گیری نور (LiDAR): یک روش سنجش از دور است که از نور به شکل یک لیزر پالس برای اندازه گیری فاصله تا سطوح استفاده می کند. این فناوری جاده ها و ساختمان ها را اسکن می کند. با اسکن LiDAR، ما یک فضای ابری از نقطه ها تولید می کنیم که آن را بارگذاری می کنیم تا نمایانگر دنیای واقعی باشد.

تشخیص و اندازه گیری رادیویی (RADAR) یک سیستم تشخیص است که از امواج رادیویی برای تعیین برد، زاویه یا سرعت اجسام استفاده می کند. RADAR ها یکی از ساده ترین سنسورهایی هستند که می توانیم در خودروهای خودران داشته باشیم. رادار فاصله نسبت محدودی را پوشش می دهد اما در مقایسه با LiDAR نسبتاً ارزان است. در حال حاضر بسیاری از وسیله های نقلیه از تکنولوژی RADAR برای جلوگیری از برخورد در هنگام پارک کردن استفاده می کنند.
سیستن موقعیت یاب جهانی (GPS): همه ما می دانیم منظور از GPS چیست. وقتی از تلفن هوشمند خود استفاده می کنید، ممکن است نیاز به یافتن مکان جغرافیایی خود داشته باشید. وقتی GPS خود را فعال می کنید، این موقعیت بر روی نقشه های Google یا سایر قابلیت های وابسته به موقعیت جغرافیایی نمایان می شود.
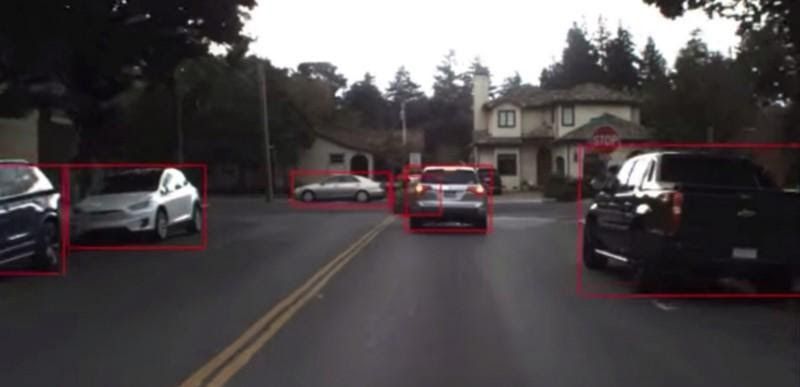
دوربین: دوربین ها حسگرهای مهمی در خودروهای خودران هستند که به خودروها اجازه می دهد اشیا و افراد را در دنیای واقعی شناسایی کنند. به لطف آخرین پیشرفت ها در تکنیک های ماشین لرنینگ، به ویژه در شبکه های عصبی، وسایل نقلیه خودران می توانند از دوربین ها برای تشخیص و شناسایی اجسام استفاده کنند.
جنبه های کلیدی خودروهای خودران
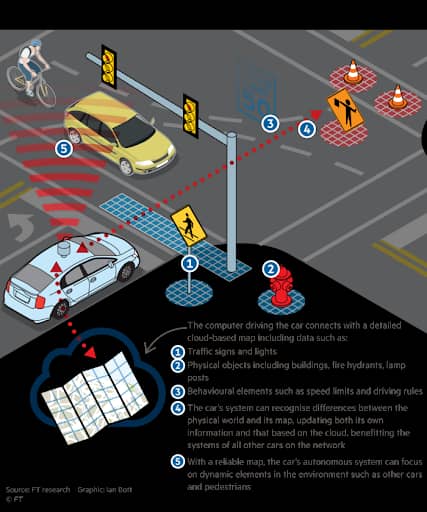
اولین چیزی که خودرو به آن نیاز دارد، توانایی تشخیص موقعیت مکانی خود است. برای انجام این کار، یک وسیله نقلیه خودکار باید دارای یک نقشه با وضوح بالا یا همان HDMap باشد که شامل اطلاعات زیادی در مورد جاده و محیط اطراف است. ایجاد یک نقشه با وضوح بالا به تلاش زیادی نیاز دارد. شرکت هایی هستند که تنها هدف آنها ایجاد و به روز نگه داشتن نقشه های با وضوح بالاست است.
برای ایجاد یک نقشه با وضوح بالا، ترکیبی از LiDAR و دوربین ها، محیط اطراف خودرو را اسکن می کنند و این داده ها با استفاده از دید رایانه ای به منظور استخراج علامتهای جاده، وسایل نقلیه مجاور و خطوط جاده تجزیه و تحلیل می شود.
وسایل نقلیه خودران همیشه باید بدانند در بین کدام خطوط جاده در طول یک مسیر مشخص قرار گرفته اند تا تصمیمات لازم برای ماندن در آن خط یا تغییر خط را لحاظ کنند. برای این منظور می توان از LANENET که یک کتابخانه پرکاربرد در دنیای وسایل نقلیه خودران است، استفاده کرد.
برآوردگر وضعیت
برآوردگرد وضعیت ورودی تمام سنسورهای خودروی خودران را هماهنگ کرده و موقعیت جغرافیایی خودرو را در HDMap به روز نگه می دارد. برآوردگر وضعیت این کار را با دریافت داده های جمع آوری شده از همه قسمت های مختلف خودرو انجام می دهد. در موقعیت های مختلف ممکن است اطلاعات دریافتی از حسگرهای متفاوتی ترجیح داده شود. به عنوان مثال، اگر وسیله نقلیه داخل یک تونل باشد، ممکن است سیگنال GPS قابل اطمینان نباشد و برآوردگر وضعیت برای به روز رسانی موقعیت جغرافیایی خودرو باید به سنسورهای دیگر مانند LiDAR ، RADAR و حرکت لاستیک ها تکیه کند. همینطور در بزرگراه ممکن است یک کامیون در جلوی وسیله نقلیه باشد که مانع از درک سنسور LiDAR از کل جهان جلوتر از وسیله نقلیه می شود. در این شرایط، ماشین خودران ما کور خواهد شد. اما با یک سیگنال HDMap و GPS قابل اعتماد، خودروی ما می تواند تصور بسیار خوبی از آنچه در پیش رو دارد، داشته باشد. در نهایت یک برآورد کننده، وضعیت داده ها را از چندین سنسور در وسیله نقلیه خودکار دریافت و ترکیب می کند. برآوردگر وضعیت مقادیر ورودی های مختلف را یکپارچه می کند.
برنامه ریز حرکت
برنامه ریز، حرکت مسئول حرکت است. اگر قصد داریم یک خودروی خودران را از نقطه ای به نقطه دیگری منتقل کنیم، اولین گزینه ممکن است حرکت رو به جلو، دور زدن یا دنده عقب باشد. این برنامه ریز حرکت است که تعیین می کند در هر مرحله باید چه اقدامی انجام شود و چه مانورهایی برای رسیدن خودرو به مقصد مورد نیاز است.
برآورد کننده وضعیت به وسیله نقلیه کمک می کند تا بفهمد چه زمانی مانعی در مسیر خودرو ایجاد می شود و متناسب با آن دستور توقف صادر می کند. هنگامی که زمان تغییر خط خودرو فرا می رسد، برنامه ریز حرکت مانورهای لازم را برای تعویض خط فرا می خواند.
این ها جنبه های اساسی هستند که هنگام گردش در دنیای خودروهای خودران باید مورد توجه قرار گیرند. کتابخانه ها، الگوریتم ها و معماری وسایل نقلیه بسیار بیشتری وجود دارد که باید در توسعه خودروهای خودران مورد توجه قرار گیرد، اما اکنون باید درک اساسی داشته باشید که چه چیزی باعث می شود یک اتومبیل به صورت خودران رانندگی کند.